Sensor Overview
Space-Borne Sensor overview
As we enter the golden era of oceanic surface wind observations, a wide range of remote sensing sensors are currently available for estimating TC, ETC, and PL 2D surface wind structure. An overview of the different available sensors, their main characteristics, calibration/validation issues and specificity for the high wind conditions is provided in this section. Besides their inclusion in the Extremes Atlas (Section 3.2), the satellite-derived wind products described in this section are planned to be used as input to the multi-mission product (Section 3.1) and the added-value products (Section 3.3). As such, they will undergo an intercalibration (Section 3.1.1.1) to ensure optimal use. Due to the vast amount of datasets and the limited timeframe of the project, the use of the different satellite-derived sensors has been prioritized by splitting them into tier 1 (high priority) and tier 2 (lower priority) categories. Note also that the satellite datasets described below will be used over all storm-related regions, i.e. under TC, ETC, and PL conditions. Finally, the in situ and other sensor datasets described in Section 2.2.7 will be mainly used for inter-calibration and validation purposes, and will also be included in the Extremes Atlas.
L-band radiometers
The recent availability of spaceborne L-band radiometers operating at 1.4 GHz (SMOS and SMAP), which measure the passive thermal emission from the wind-roughened ocean surface caused by sea-foam (whitecaps) offer new opportunities to measure extreme wind in storms. At wind speeds above 8 0 kt/40 ms-1, L-band radiometers have a distinct advantage over most other passive microwave instruments. In fact, the signal of the low microwave frequency (L and C-bands) radiometer shows no sign of saturation or sensitivity loss even in extreme winds. The reason is that the low microwave frequency emission from the wind roughened ocean surfaces keeps increasing approximately linearly with wind speed (Nordberg et al. 1971; Monahan and O’Muircheartaigh 1980; Reul and Chapron 2003; Anguelova and Webster 2006, Hwang et al. 2019a, 2019b), and does not saturate, even at wind speeds above 135 kt/70 ms-1 (Reul et al. 2012; Yueh et al. 2013; Meissner et al. 2014; Reul et al. 2016; Fore et al. 2016; Meissner et al. 2017). This advantage of radiometers in estimating extreme wind speeds had already been suggested by Jones et al. (1981) in their pioneering aircraft flight into Hurricane Allen. In addition, due to the use of a long wavelength, L-band radiometers are mostly unaffected by rain or frozen precipitation (Wentz, 2005; Reul et al., 2012). This is not the case for the C-band radiometers such as SMFR (4–8 GHz) for which multi-frequency channel combination is needed to correct for the rain effects and in turn to retrieve the surface wind speed (Uhlhorn and Black, 2003). For wind speeds below 30 kt/15 ms-1, the performance of L-band radiometers to measure scalar wind speeds is typically not as good as that of higher frequency radiometers (i.e. GMI, AMSR2, WindSat) or scatterometers (QuikSCAT, ASCAT, RapidScat, ScatSat) due to larger radiometer noise and lower sensitivity.
The major drawback of the L-band radiometers is their rather coarse spatial resolution (40-km or worse), which limits use in coastal areas (and also to describe most TC’s or PL’s inner core properties). To even achieve a spatial resolution of 40 km using L-band frequencies is a technological feat that requires either a large antenna or the utilization of the synthetic aperture techniques. NASA Soil Moisture Active Passive (SMAP) (Entekhabi et al. 2010, 2014) uses the first approach, has a real aperture, and a spinning mesh antenna of 6-m diameter. In contrast, the ESA Soil Moisture and Ocean Salinity (SMOS) (Kerr et al. 2010, Mecklenburg et al. 2012) is a synthetic aperture radiometer that measures effectively the spatial Fourier transform of the emitted brightness temperature, which is referred to as visibility. This visibility function is then converted into scene brightness temperatures, from which the surface wind speed can be retrieved.
It should be noted that the wind speed retrieval of L-band radiometer relies on ocean surface salinity as external ancillary input. In some locations, this ancillary input can be inaccurate, for example in the highly dynamical ocean regions such as freshwater river plumes (Amazon Congo, Gulf of Bengal, Mississippi), which can result in wind speed errors in these areas.
Both SMOS and the SMAP L-band radiometers are still very valuable to provide reliable measurements of extreme ocean wind speeds at a spatial resolution of 40 km (Reul et al. 2016, 2017; Yueh et al., 2016, Meissner et al., 2017). These methods have been trained and/or tested using aircraft-based in-situ wind speed data from SFMR. Despite the capabilities of this methodology it is noteworthy that there is still a scarcity of reliable in-situ wind measurements in major hurricanes with winds exceeding 100kt/50 ms-1, which makes it challenging to train/validate the L-band models or emissivity Geophysical Model Functions (GMFs). Wind speeds are processed and distributed in Near-Real-Time for both sensors: http://www.smosstorm.org/ distributes SMOS winds and http://www.remss.com/missions/smap/winds/ distributes SMAP winds, both at approximately 40-km spatial resolution. SMAP winds speed estimates based on a different GMF (see Fore et al. 2018, Yueh et al. 2016) with 60-km spatial resolution are also distributed at https://podaac.jpl.nasa.gov/dataset/SMAP_JPL_L2B_NRT_SSS_CAP_V42.
There are many examples how SMAP and SMOS wind speeds are helpful for both intensity and wind radii estimates (Reul et al. 2012; Yueh et al. 2013; Meissner et al. 2014; Reul et al. 2016; Fore et al. 2016; Reul et al., 2017; Meissner et al. 2017) and real-time data are helping TC forecasts and adding quality information to historical records.
Already mentioned and certainly important to repeat, the major limiting factor of the L-band radiometers to measure winds in tropical cyclones is their spatial resolution (~ 40 km). In many cases, this does not allow to resolve the structure around the eye of the tropical cyclone, in particular for small compact systems (i.e. essentially the most intense storms). It also puts a limitation on how close to the coast accurate ocean wind speed measurements can be performed. For the SMOS case, root mean square differences with other co-located wind speeds from other sensors (SMAP, WindSat, AMSR-2, SSMI/F16, F17 and F18) increases from ~2.5 m/s for open ocean scenes to ~5 m/s when the distance to coast is less than ~250 km. However, combined data from SMOS and SMAP do provide new, independent and very regular estimates of R34, R50, and R64 for each given storm, as well as estimates of intensity provided at ~40 km resolution (Reul et al., 2017 Meissner et al. 2017, Fore et al. 2018). In the last couple of years, the Joint Typhoon Warning Center (JTWC) has been using RSS SMAP and SMOS data to aid with their analysis of surface winds and intensity and fix information is being saved on the Automated Tropical Cyclone Forecasting Systems (ATCF) (Sampson and Schrader, 2000) for best track preparation.
Table 1 shows some characteristics of the L-Band datasets which will be used in the project, including their data availability within the 2010-2020 time frame. Both SMOS and SMAP belong to the Tier 1 category.
Table 1. List of radiometer wind datasets available in the period 2010-2020.
Higher frequency radiometers
It is difficult to measure wind speeds in precipitation with radiometers that operate at frequencies above 10 GHz (Meissner and Wentz, 2009). The atmospheric attenuation by rain droplets increases with increasing frequency and thus results in a smaller wind signal at the top of the atmosphere. Moreover, it is difficult to model the rain attenuation accurately. This results in large errors of the retrieved wind speeds in rain if using algorithms that have been developed in rain-free conditions.
It has been shown that this problem can be mitigated to a good extent if the sensor has a combination of C-band and X-band channels, which is the case for WindSat and AMSR2. They both have V-pol and H-pol channels at 6.8/6.9 GHz and 10.7 GHz (Meissner and Wentz, 2009; Zabolotskikh et al., 2015). It is possible to find combinations between the C-band and X-band channels that minimize the rain impact and allow the retrieval of wind speeds in rain.
Based on this principle, all-weather algorithms have been developed for WindSat and AMSR2, which retrieve winds in rain from these sensors and data are currently distributed at www.remss.com , www.smosstorm.org and at https://manati.star.nesdis/noaa.gov/datasets//GCOM2Data.php/ . These all-weather wind algorithms need to be trained with match-ups between the measured radiometer brightness temperature TB and a reliable true wind speed. The availability of SMAP wind speeds in TC offers an excellent opportunity to overcome this problem. There is now enough credible evidence that SMAP can reliably measure wind speeds in storms above 24 kt/12 ms-1 up to at least category 3 and even in heavy precipitation. SMAP and WindSat have almost the same local ascending node time (approximately 18:00), which results in a very large number of match-ups between WindSat TB, WindSat rain rates and SMAP wind speeds. That means that the SMAP wind speed can be used in training the WindSat all-weather winds using the WindSat – SMAP match-up set. Rain contamination effects in the WindSat all-weather winds that are trained from SMAP are small.
Note that there are other AMSR2 Sea Surface Wind Speed (SSWS) products that are available to operational users. The first is GCOM-W1 AMSR2 SSWS product via NOAA’s Center for Satellite Applications and Research, which is currently available for use in operational workstations, which uses a statistical methodology (see Chang et al. 2015 and Alsweiss et al. 2018). The second is JAXA’s all-weather SSWS algorithm (see Shibata 2002, 2006). The intercomparison of these products shown in Alsweiss et al. (2018) suggests that both of these are useful products for TC operations.
Table 1 shows some characteristics of the higher-frequency radiometer datasets which will be used in the project, including their data availability within the 2010-2020 time frame. Those in white (grey) background belong to the Tier 1 (2) category.
Scatterometers
Scatterometers provide (like all MW sensors) 10-m stress-equivalent winds (de Kloe et al., 2017). While microwave radiometers mainly provide the wind speed component (except for polarimetric radiometers, which also provide the wind direction for winds above 7-8 m/s), scatterometers provide accurate ocean vector winds, on a grid of 5.6 km (Vogelzang and Stoffelen, 2017), 12.5 km or 25 km (Vogelzang et al., 202 1). Over the years, improvements have been made on the development of the empirical Geophysical Model Functions (GMFs) in order to obtain more accurate wind estimates with respect to moored buoy in situ measurements. Scatterometer measurements are then largely used for weather warning and forecasting, climate monitoring, research on processes, ocean forcing and air-sea interaction. Indeed, C-band scatterometers have the capability to provide all-weather measurements, including in extreme wind conditions. They are routinely used in the nowcasting of extreme winds for TCs, ETC and PLs. They are mentioned in 25% of all TC discu ssions at NHC for example. However, developing and verifying wind scatterometer processing algorithms for high and extreme winds is challenging, since in situ wind measurements are scarce and they may be hazardous and unreliable (Stoffelen et al., 2020). Moreover, theoretical statistical descriptions of the high‐wind ocean surface, where patchy foam, droplets, spume and wave breaking occur are much simplified, while the microwave interaction on cm scales is rather complex. It has to be highlighted that these challenges do exist for all MW sensors (English et al., 2021).
With seven scatterometers currently operating in orbit and a few others to be launched in the near future, a wide variety of scientific and operational applications will certainly benefit from consolidated wind retrieval procedures, and in particular from well-intercalibrated C- and Ku-band systems at extreme wind conditions. The following scatterometers are currently operating: the three C-band Advanced Scatterometers, ASCAT-A, -B & -C onboard the European Metop-A, -B, and -C, respectively; the HSCAT-B, HSCAT-C and HSCAT-D onboard the Chinese HY series ; the rotating fan-beam scatterometer CSCAT onboard the Chinese-French CFOSAT, while WindRad on board Feng-Yun - 3 was launched 5 July 2021. Note also the data availability over the last decade of other Ku-band scatterometers: OSCAT onboard Ocean sat-2, HSCAT-A onboard HY-2A, and RapidSCAT installed on the International Space Station (ISS). Moreover, the launch of OSCAT-3 onboard the Indian Oceansat-3 is expected in the near future. While the ASCATs are operating at C-band with fixed viewing geometry, the others are operating at Ku-band and have varying viewing geometry (except for WINDRAD which operates at both C- and Ku-band). Such differences result in different slightly retrieval approaches and thus different sensor capabilities, though wind vector quality is very good throughout (Vogelzang and Stoffelen, 2021)..
Regarding the scatterometer extreme wind capabilities, three main limitations have been reported over the last decade: their spatial resolution, their sensitivity to rain for Ku-band in particular (Alpers et al., 2016), and their signal saturation at very high winds (Polverari et al., 2021).
The scatterometer-derived winds have a spatial resolution of about 25 km. Because of their optimized viewing geometry, the C-band systems are of slightly higher effective resolution than the Ku-band systems (Vogelzang et al., 202 1). Some attempts to increase the resolution at the cost of some additional noise have been carried out. For example, KNMI has developed an Ultra High Resolution (UHR) ASCAT product at 5.6-km grid spacing, but with effective spatial resolution of about 20 km (Vogelzang et al., 2017). The scatterometer resolution, being about twice higher than that of the L-band radiometers, operationally provides some added-value information about the structure of the TCs and PLs.
While C-band scatterometers are known to be less affected by the presence of rain than Ku-band scatterometers (e.g., Portabella and Stoffelen 2001; Portabella et al., 2012), consolidated quality control (QC) procedures are essential, in particular for extreme weather applications. Over the last few years, important advances in scatterometer QC have led to more consolidated C- and Ku-band scatterometer-derived wind products (Lin et al. 2015; Lin and Portabella, 2017; Xu and Stoffelen, 2020; Xu et al., 2021). Also relevant, recent Ku-band GMF developments have led to better inter-calibrated C- and Ku-band scatterometer winds (Wang et al., 2017).
NRT and climate products and user services are provided by the EUMETSAT Ocean and Sea Ice Satellite Application Facility (OSI SAF) and the EU Copernicus Marine Environment Monitoring Service (CMEMS) for most scatterometers at resp. L2 and L3/L4. NRT instrument monitoring and wind product visualization is available at KNMI, as well as training material, user manuals and validation reports, inter alia.
Table 2. List of scatterometer wind datasets available in the period 2010-2020.
Importantly, in contrast with the cross-polarized backscatter signal, the C- and Ku-band co-polarized radar signal is known to saturate at extreme winds. As such, the future EPS-SG C-band SCA scatterometer will include cross-polarization measurements to be able to improve the detection of hurricane-force winds. Within the CHEFS project (Stoffelen et al., 2020) a preliminary calibration of ASCAT extreme winds, using a 10-year dataset of collocated SMFR-ASCAT wind data in storm-centric coordinates, was performed. SFMR winds, which are calibrated with dropsonde data (Uhlhorn et al., 2007), are upscaled to account for ASCAT-resolved spatial scales (or representativeness). The so-called ASCAT dropsonde-scale winds show sensitivity to extreme winds, and an overall correlation with SFMR upscaled winds of about 0.9 (Polverari et al., 2021 ). The saturation of the GMF at extreme winds is somehow compensated by the high calibration stability of the ASCAT instrument. This brings a new perspective into the existing co-polarized scatterometer extreme wind capabilities. Indeed, a similar performance is therefore expected for dropsonde-scaled Ku-band systems, an activity which is foreseen within MAXSS.
Table 2 shows some characteristics of the C- and Ku-band scatterometer wind datasets, which will be used in the project, including their data availability within the 2010-2020 time frame. Those in white (grey) background belong to the Tier 1 (2) category.
Synthetic Aperture Radar
A SAR instrument has the unique capability to probe the ocean surface at very high resolution (tens to hundreds of meters depending on the mission and acquisition mode), providing not only the full spectrum of very local intensities, but also detailed structural parameters. As a matter of fact, first images of Tropical Cyclones have been presented after the launch of the first SAR mission for Earth Observations, and already revealed the high dynamic of the radar cross-section across the storm eye (Fu and Holt, 1982). More recently, the launch of Radarsat-2 mission in 2007 with new polarization capabilities suggested the potential of cross-polarization channel to provide estimates of wind speed in storms (Zhang and Perrie, 2012). After the launch of Sentinel-1A in 2014 with a dual-polarization capability, the same potential has been confirmed and extended to higher category Tropical Cyclones (Mouche et al., 2017).
When compared to airborne Stepped Frequency Microwave Radiometer (SFMR) analysis, Mouche et al. (2019) demonstrated that Sentinel-1 SAR measurements uniquely capture inner core characteristics to provide independent measurements of the maximum wind speed and the radius of maximum wind. For the TC cat-5 Irma, near the radius of maximum wind, a 65-m/s increase in wind speed in less than 10 km has then been estimated, corresponding to an instantaneous absolute vorticity of order 210 times the Coriolis parameter. High-resolution capabilities can then offer unique ability to detect and detail possible supergradient-wind region, near the radius of maximum winds, where tangential winds can be much larger than expected gradient winds (e.g. Vickery et al., 2009, Montgomery et al., 2014).
SAR High resolution also allows detection of the rolls in the marine atmospheric boundary layer, of the waves modulation in the backscattered signal and of the rain bands in the outer core of the Tropical Cyclones. As such, a SAR instrument is the only available satellite technology capable of producing fine-scale, wide-swath boundary-layer process data in nearly all-weather conditions (e.g. Combot et al., 2020).
The main limitation of SAR is certainly due to the low signal-to-noise ratio of the backscattered signal in cross-polarization and the accuracy of the noise level to allow an homogeneous signal quality over the full range of the wide swath (in both azimuth and range directions). This can significantly impact the wind speed estimate. Recent work on Sentinel-1 has demonstrated the feasibility of improving the signal quality for Interferometric Wide swath products (Park et al., 2018) and now Extended Wide swath products. The analysis of the backscattered signal at high resolution exhibits obvious rain contamination leading to NRCS decrease or increase. For instance, comparisons with airplane measurements showed up to 10 m/s decrease near the maximum wind speed (75 m/s) area in the case of Irma Tropical Cyclone when it was category-5 (Mouche et al., 2019). The analysis of the variability in the radar signal at high resolution ( Local Gradient approach from Koch, 2004) allows to spot this rain contamination. Finally, contrary to a scatterometer, existing SAR only have one single antenna with no viewing angular diversity. This prevents direct wind direction estimates .
The high-resolution capability further offers straightforward means to compare and evaluate the characteristics of the other sensors, mostly operating at medium- (order 10-20 km) to low- (order 30-60 km) spatial resolution. First, Radarsat-2 and Sentinel-1 C-band co-polarized and cross-polarized normalized radar cross sections (NRCS) can be directly compared to very locally analyzed differing polarization sensitivities and the sensor resolution impact when sampling smallest and strongest systems (with wind speed increase up to 70 m/s in less than 40 km. Second, Zhao et al. (2018) further adjusted (smoothed), closely (< 20 mn) co-located observations over extreme storm cases, to different spatial resolution, to inform about similarities and differences with other measurements obtained at low resolution (about 40 km). Remarkably, high consistency was found between L-band brightness temperature measurements and the C-Band cross-polarized NRCS.
This directly demonstrates the potential to define multi-mission products based on both active and passive medium resolution measurements - especially when cross-polarization will be available for scatterometers (e.g. MeTop-SG). In the framework of MAXSS, this provides means to get direct comparisons between active radar cross-section and passive brightness temperature measurements at coincident time over TC to investigate the specificity of each of the techniques before merging products.
Status of the SAR dataset
Tropical Cyclones: MAXXS directly benefits from the ESA CYMS project which aims at maximizing the observations of TC with Sentinel-1 mission and Radarsat-2. Figure below synthesizes the status of the acquisitions available at IFREMER for MAXXS.
Status of Sentinel-1 and Radarsat-2 data acquired over TC.
Polar Lows: A first study of the available hits has already been done for Sentinel-1. A synthesis of the available dataset is presented on Figure below. Regarding Radarsat-2, the status of the data acquired over PL and available for MAXSS is being assessed by NERSC.
Status of Sentinel-1 data acquired of PL.
Extension of the SAR dataset
Sentinel-1: The phase 2 of CYMS should start in spring 2021. This will allow us to get additional data over TC. Nothing particular is requested for PL as routing acquisitions are performed over European waters.
Radarsat-2: A specific action has started at ESA to grant MAXXS consortium with the use of Radarsat-2 as it is part of the third party missions. Action for ordering the data is being performed.
RCM: Under investigation at ESA.
Figures above show some characteristics of the SAR wind datasets, which will be used in the project, including their data availability within the 2010-2020 time frame. All the SAR systems belong to Tier 1 category.
GPS Reflectometry
The CYclone Global Navigation Satellite System (CYGNSS) is a constellation of eight small satellites in a LEO orbit configuration launched in December 2016 [Ruff, 2019]. The scientific goal is to improve the knowledge of the tropical cyclone dynamics by estimating ocean surface wind speeds. This estimation is obtained by measuring the delay and Doppler spread of forward scattered GPS L1 C/A signals (Fc=1.57542 GHz, BW=~2 MHz) over the surface of the Earth, technique known as Global Navigation Satellite System Reflectometry (GNSS-R) [Zavorotny, 2014]. The combination of the CYGNSS and GPS constellations gives a better coverage in the tropics than classical polar-orbiting sensors (i.e., altimeters, scatterometers, or radiometers).
The instrument on board the CYGNSS satellites is the Delay Doppler Mapping Instrument (DDMI) [Gleason, 2015], which computes the so-called power Delay Doppler Maps (DDMs), that is to say, the time cross-correlation between a reflected GPS signal over the Earth surface and a clean replica of the transmitted one for several Doppler frequencies [Zavorotny, 2014]. The correlation length is 1 ms and the current number of power averages is 500. The same operation is also performed between the direct signal and the same reference signal for reference purposes.
The L1 products calibration consists of two parts [Gleason, 2019]. Firstly, the DDMs of processed counts are converted into units of Watts. Secondly, these DDMs are converted to DDMs of bistatic radar cross-section values by unwrapping the forward scattering model, which are then normalized by the surface scattering area to arrive an observation of σ0.
So far, two L2 wind speed products exist: the regular one from NASA/Michigan University [CYGNSS L2] and the one developed by NOAA [NOAA L2]. The former combines two empirical Geophysical Model Functions (GMFs), each one obtained with a different observable derived from the DDM: the DDM average (DDMA) and the Leading Edge Slope (LES) [Clarizia, 2016; CYGNSS ATBD]. Spaceborne GNSS-R data shows reduced sensitivity to wind speeds above ~10 m/s. This is improved in the NOAA product by adding a wind speed bias correction using modeled wind speeds and Significant Wave Heights (SWHs), as space-borne GNSS-R data is sensitive not only to winds but also to waves [Said, 2019; NOAA L2 User Guide]. The overall Root Mean Square Deviation (RMSD) with respect to forecast European Centre for Medium-Range Weather Forecasts (ECMWF) is 2.05 m/s for the regular L2 3.0 and 1.34 m/s for the NOAA L2 1.1. The upcoming regular L2 3.1 version will also incorporate SWH bias correction [Pascual, 2021]. Preliminary results show a similar performance to that of NOAA.
Two major problems in any GNSS-R instrument are the fact that the transmitted power is unknown, and that the Signal-to-Noise Ratio SNR is very low. These two factors have a large impact for large wind speeds, and is also for that reason that bias correction algorithms such as those mentioned above are needed. In CYGNSS, the impact of the former problem is reduced by estimating the transmitted power using the up-looking GPS antenna. This power calibration is continuously improved in successive DDM L1 versions.
Besides the two L2 wind speed products, algorithms exclusively devoted to estimate hurricane wind speeds are also being investigated. As an example, the work in [Al-Khaldi, 2020] uses simulated DDMs obtained with different storm parameters, which are then used as a reference in an inverse retrieval algorithm. The predicted unbiased RMSD with respect to National Hurricane Center Best Track forecasts is 5.20 m/s. Another example is [Cardellach, 2020], which uses a physical forward model instead of an empirical GMF. Dispersion in the range between 45 and 50 m/s using real typhoon data is just 3.7 m/s.
The CYGNSS wind data product for the period 05/2017 - 12/2020 is available from PO.DAAC in NetCDF format.
Altimeter winds
Although the altimeter coverage is very limited because of its narrow swath, accurate wind speed plus sea state data at 5–10-km resolution within intense small-scale TC, ETC, and PL events is clearly very useful and unique for forecasts, hindcasts (e.g. Quilfen et al.,2011, Hanafin, et al., 2012, Kudryavtsev et al., 2015), and validation purposes. Altimeter dual-frequency measurements provide along-track information related to surface wind speed, wave height, and vertically integrated rain rate at about 6-km resolution. Although limited for operational use by their dimensional sampling, the dual-frequency capability makes altimeters a unique satellite-borne sensor to perform measurements of key surface parameters in a consistent way. Table 3 shows some characteristics of the Altimeter wind datasets, which will be used in the project, including their data availability within the 2010-2020 time frame. All the altimeter systems belong to Tier 2 category.
Table 3 List of scatterometer wind datasets available in the period 2010-2020, [source CEOS OST-VC]
Altimeter mission | Data Format | Period | Source |
Jason 1 | BUFR/Netcdf | 01/2010- 07/2013 | Aviso |
Jason 2/OSTM | BUFR/Netcdf | 01/2010- end 2019 | Aviso |
Cryosat-2 | BUFR/Netcdf | Full period | Aviso |
Hy-2A | BUFR/Netcdf | Mid 2012 – 01/202 | Aviso |
Saral | BUFR/netcdf | 2013 -2020 | Aviso |
Jason3 | BUFR/netcdf | 2015-2020 | Aviso |
Sentinel-3A | BUFR/netcdf | 2015-2020 | Aviso |
Sentinel-3B | BUFR/netcdf | 2018-2020 | Aviso |
In-situ and other sensors
Stepped-Frequency Microwave Radiometer
The Stepped-Frequency Microwave Radiometer (SFMR) is a passive nadir-looking instrument onboard the NOAA WP-3D and U.S. Air Force Reserve Command (AFRC) aircrafts (the so-called hurricane hunters) that measures the brightness temperature () of the ocean surface at six C-band frequencies. In order to ensure that the values measured during the flight are accurate, an in-flight ocean calibration is always performed prior to each flight campaign. For each channel, such ocean calibration aims to adjusting few of the instrument internal temperature coefficients forming the calibration equation, in order to reflect the actual conditions. However, errors in the definition of these calibration coefficients may occasionally occur, leading to differences between the SFMR-measured values and the corresponding values predicted by the GMF, i.e., the so-called tuning error. The NOAA/NESDIS/STAR ocean surface wind team (OSWT) has developed a bias correction routine in order to correct for these differences. Such correction is applied to the measured and the corrected value is then used in the simultaneous wind and rain retrieval process. More details can be found in Sapp et al. (2019). The SFMR dataset used for the present study has been inspected by the NOAA/NESDIS/STAR OSWT to ensure that they were good in terms of instrument calibration and wind retrievals. In particular, they have excluded those data whose values was not considered as reliable, because of: (i) differences amongst the six channels higher than 2K, suggesting possible errors in the calibration equation; (ii) presence of high amount of noise in the channels; (iii) possible instrument instability (visible in few SFMR flights of 2008, but which has been fixed since then). As shown in Sapp et al. (2019), the standard deviation of the SMFR wind speed error with respect to dropsondes is typically 3-4 m s-1 for wind speed between 15-40 m s-1 in low rain, while biases are below 1 m s-1.
The wind retrievals are provided at a frequency of 1 Hz. Note that most NOAA P-3 flights have more accurate geolocation information than AFRC flights. This is because AFRC geolocation (latitude/longitude) information is archived in floating numbers with only two decimals. As such, assuming a flight speed of about 100 m s-1 and an SFMR sampling rate of 1 Hz, about 10 SFMR data points are assigned to the same lat/lon position in AFRC flights. Also, depending on the flight orientation, the SFMR data points are grouped over two apparent parallel tracks, whereas in reality there is only one single track distributed. This leads to a geolocation error of 0.005 deg, which should be taken into account when using AFRC data. Note that the geolocation error is very much reduced in NOAA P-3 flight data, since a higher precision geolocation information (floating-point numbers with four decimals) is kept.
The SFMR-derived sea surface wind data, which are calibrated with dropsondes, are provided at a sampling rate of 1 Hz (i.e., about 100m grid spacing) and are one of the main extreme-wind reference datasets used for calibration and validation purposes within MAXSS. The SFMR wind and rain retrievals reprocessed by the NOAA/NESDIS/STAR OSWT will be used within MAXSS. These data have been reprocessed using a new GMF that corrects an approximate 10% low bias observed in the SFMR wind retrievals between 15 and 45 m s-1 with respect to dropsondes [Sapp et al., 2019] and are available at https://manati.star.nesdis.noaa.gov/SFMR/ for the period 2002-2020. The same SFMR datasets but using a different wind & rain retrieval algorithm (Klotz and Uhlhorn, 2014) are available from the NOAA/AOL Hurricane Research Division (HRD) at https://www.aoml.noaa.gov/hrd/data_sub/hurr.html. Likewise, the dropsonde and IWRAP datasets described below are also available from the above-mentioned sites for the similar periods, although the dropsonde record goes back to 1996.
Dropsondes
GPS dropsondes are launched from the hurricane hunters’ aircraft to measure profiles of wind speed, direction, pressure, temperature and relative humidity from the moment they are launched until they reach the ocean surface (Hock et al., 1999). The dataset used in this analysis covers the same as that of the SFMR dataset. The dropsonde 10-m winds are estimated by an averaged wind computed from the corresponding wind profile at the lowest 150 m, the so-called WL150 algorithm (Franklin et al, 2003; Uhlhorn et al., 2007). After exiting the aircraft, the soundings usually undergo an extreme change, so that all the sensors need time before they settle in the new environmental conditions and they start acquiring valid measurements. The data processing tool (ASPEN) usually filters out these invalid points. The dropsonde sampling rate ranges 1-4 Hz.
SFMR is calibrated with respect to the WL150 dropsonde data and hence consistency of both sources in calibration is expected. Stoffelen et al. (2020) show that when using a 150-m layer at altitudes higher than the nominal m (e.g., for cases in which the dropsonde fails to report wind measurements close to the surface), the WL150 winds are biased high (as compared to the nominal case). Note also that the SFMR/dropsonde statistics also change with the WL layer thickness. In particular, the WL25 (based on a layer thickness of 25 m) winds best agree with both the dropsonde lowest reading and SFMR winds. Low-level dropsonde winds appear mutually very consistent and consistent with a logarithmic profile above 30 m. However, estimates of the 10-m wind are very sensitive to the dropsonde height sampling and knowledge. In line with this, an open question is related to the fundamental measurements of the dropsonde, i.e., the position measurement, which is proprietary information of the GPS manufacturers. Since the dropsonde is increasingly decelerated along its path towards the ocean surface, the position filtering could have systematic effects on position (lag), hence on speed and acceleration of the sonde, which are used to determine the 10-m wind. Detailed information from manufacturers appears essential to understand possible errors (error propagation modelling is needed). Stoffelen et al. (2020) suggest additional analysis using logarithmic wind profiles to further investigate the observed dropsonde 10-m winds, which are a more direct and accurate calibration resource for the 10-m surface wind than WL150 estimates. The topic also includes an assessment of the position processing of the sonde near the surface, where its deceleration is maximum.
1.1.7.3. IWRAP
The Imaging Wind and Rain Airborne Profiler (IWRAP) onboard the NOAA WP-3D aircrafts is a conically scanning, dual frequency (C- and Ku-band) Doppler radar that measures Doppler velocity and reflectivity profiles from precipitation as well as ocean surface backscatter at 30-m resolution simultaneously at four different incidence angles between 25° and 55°. The instrument can operate either with single-polarized antennas or with dual-polarized antennas. To this end, the front end is designed to transmit four consecutive pulses within one pulse repetition frequency (PRF) cycle, each pulse being centered at the frequency corresponding to the desired incidence angle. Each PRF cycle can be configured in any given polarization, allowing to obtain consecutive dual-polarized profiles every two PRF cycles. By providing the ocean surface wind vector via scatterometry (NRCS), 3-D atmospheric boundary layer (ABL) wind field via Doppler measurements from precipitation, and rain rate estimates from dual-wavelength differential attenuation, IWRAP is a powerful tool to improve the understanding of the inner core structure of TCs (Fernandez et al., 2005). These datasets shall be used for validation of the wind products.
Buoys
The buoys used in this study mainly include the National Data Buoy Center (NDBC) moored buoys off the coasts of U.S.A., the Ocean Data Acquisition System (ODAS) buoys in the north-east Atlantic and British Isles inshore waters, the National Oceanic Atmospheric Administration (NOAA) Tropical Ocean Atmosphere (TAO) buoy arrays in the tropical Pacific, the Japan Agency for Marine-Earth Science and Technology (JAMSTEC) Triangle Trans-Ocean Buoy Network (TRITON) buoys in the western Pacific, the Prediction and Research Moored Array in the Atlantic (PIRATA), and the Research Moored Array for African–Asian–Australian Monsoon Analysis and Prediction (RAMA) at the tropical Indian Ocean. Moored buoys come in a wide variety of configurations (e.g., in terms of mooring design, sensor types, sampling schemes, mounting techniques and telemetry) serving a wide variety of operational and research applications and disciplines.
Two different buoy data sets are freely available to the users. The first data set consists of buoy winds that hourly report an averaged wind over 10 minutes, distributed through the Global Telecommunication System (GTS) stream, and quality controlled and archived at ECMWF Meteorological Archival and Retrieval System (MARS). Such buoy data are hereafter referred to as MARS buoy winds. Note that the MARS buoy winds are binned every 1 m s-1 in speed and 10° in direction bins. The second data set consists of continuous 10-minute (10-min) buoy wind measurements, further referred to as continuous buoy winds (Cwinds). This data set is obtained from http://www.pmel.noaa.gov/, while it does not contain ODAS and TRITON continuous buoy winds. In both buoy data sets, the measured wind vectors at a given anemometer height are usually converted to 10-m equivalent neutral winds, U10N, using the Liu-Katsaros-Businger (LKB) model (Liu et al., 1979) in order to make them more comparable to ASCAT and ECMWF winds. This also causes a systematic overestimation of the buoy U10N winds by about 10% at 920 mb mean sea level pressure as compared to the ASCAT stress-equivalent winds, U10S (Stoffelen et al., 2020). Since KNMI already provides ECMWF/ERA5 model output converted to U10S (de Kloe et al., 2017), the conversion of buoy 10-m wind measurements to U10S using auxiliary information from either NWP output or the buoy itself (e.g., surface pressure, air temperature, SST, relative humidity), will be considered within MAXSS.
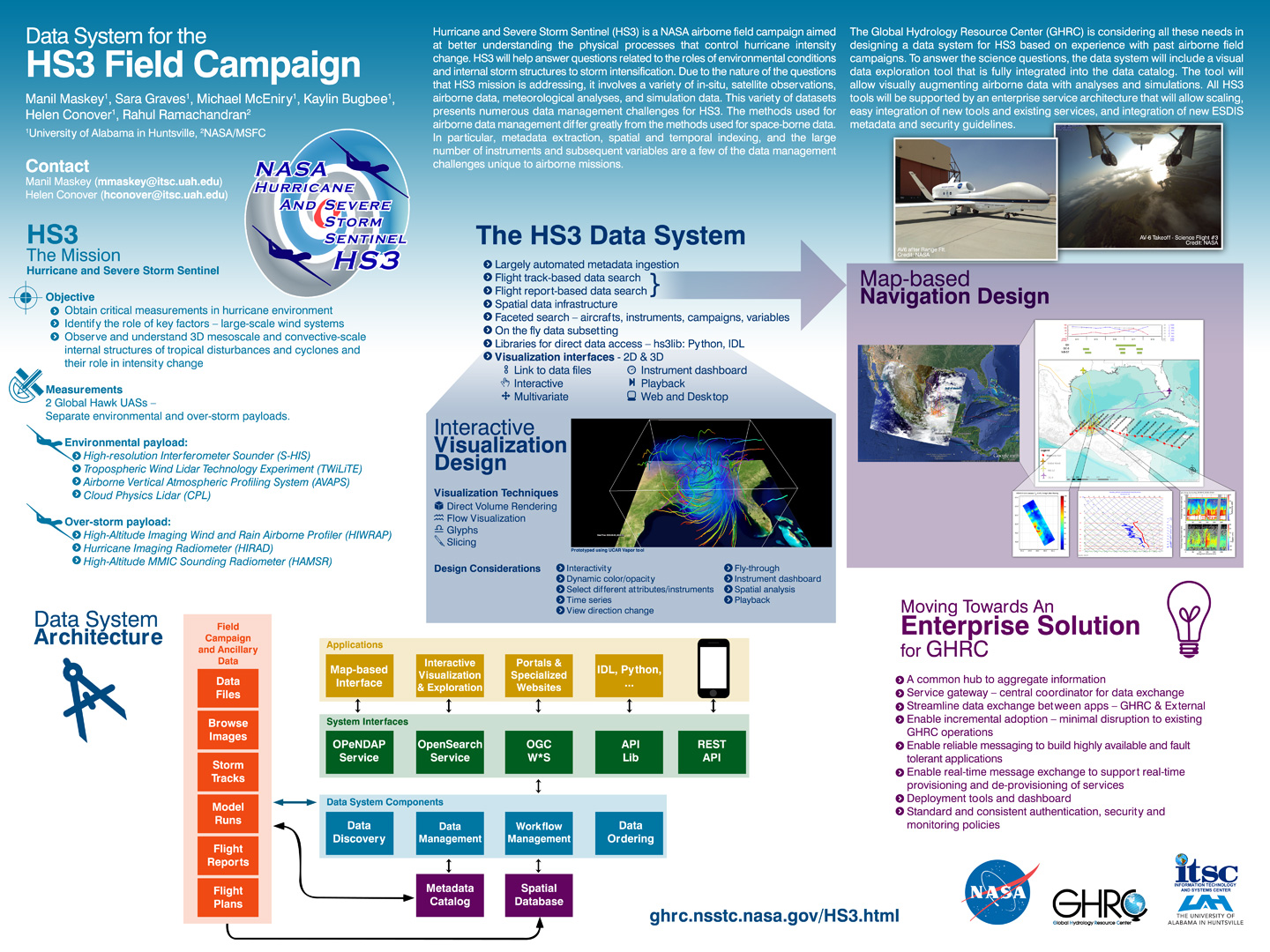
Hurricane and Severe Storm Sentinel (HS3) data
The Hurricane and Severe Storm Sentinel (HS3) was a NASA airborne field campaign focused on better understanding the physical processes that control hurricane intensity change. HS3 helped to answer questions related to the roles of environmental conditions and internal storm structures to storm intensification. Due to the nature of the questions that HS3 mission addressed, it involved a variety of in-situ, satellite observations, airborne data, meteorological analyses, and simulation data. HS3 was a 5-year mission with three observation years (2012, 2013, 2014) which are within the expected MAXSS products period. The primary aircraft used in the campaign were two high altitude, long-duration flight unmanned airborne systems (UAS). Each Global Hawk UAS was outfitted with instruments capable of measuring various storm and environmental parameters. HS3 outfitted two Global Hawk unmanned aircrafts to perform in two separate environments: Near the storm and over the storm. The instruments on each of the Global Hawk aircraft are listed below.
The BAMS HS3 Publication by Braun et al (2016) contains a detailed listing of the instruments and flights operated during the campaign.
|
|
|
| Environment Payload | Over-storm Payload |
| S-HISHigh-resolution Interferometer Sounder | HIWRAPHigh-Altitude Imaging Wind and Rain Airborne Profiler |
| AVAPSAirborne Vertical Atmospheric Profiling System | HIRADHurricane Imaging Radiometer |
| CPLCloud Physics Lidar | HAMSRHigh-Altitude MMIC Sounding Radiometer |
|
|
|
Five of the above instruments were mounted on one or the other of the two Global Hawk UAS aircraft, and each measured the atmosphere from flight altitude. The sixth, the Automated Vertical Atmospheric Profiling System (AVAPS) on the environment Global Hawk, is unique in that it contained hardware mounted on the aircraft for automated release of dropsondes which measured the atmospheric characteristics of temperature, pressure, humidity and winds during their descent. Up to 88 dropsondes could be released on each Global Hawk flight. These dropsonde data were essential for validation activities.
The HS3 field campaign dataset also consisted of various support data collected during the campaign observation periods, including:
● World Wide Lightning Location Network (WWLLN) lightning data for the observed storms
● Statistical Hurricane Intensity Prediction Scheme (SHIPS) model data
● NASA Global Modeling and Assimilation Office (GMAO) Dust Aerosol Optical Thickness (AOT) data
● Various satellite data obtained from the Naval Research Lab cropped to storm locations
● Cloud top height, overshooting tops, and brightness temperatures from the Cooperative Institute for Meteorological Satellite Studies (CIMSS)
Aircraft navigation data, instrument reports and flight reports are included in the collection. These additional data contain satellite imagery, instrument retrieval plots, and maps of flight tracks and dropsonde locations.
A specialized data system was developed for HS3 that simplified access to the many heterogeneous data included in the campaign collection. An instrument of interest for MAXSS is HIRAD, a multi-frequency, hurricane imaging, interferometric single-pol passive C-band radiometer, operating from 4 GHz to 7 GHz, with both cross-track and along-track resolution that measures strong ocean surface winds through heavy rain from an aircraft or space-based platform. A one-dimensional thinned synthetic aperture array antenna is used to obtain wide-swath measurements with multiple simultaneous beams in a push-broom configuration. HIRAD features software beam forming with no moving parts, internal hot, cold, and noise diode based calibration, and continuous, gap-free imaging. Its swath width is approximately 60 degrees in either direction. There are two products: rain rate and wind speed.
{kind=link}
The basis of the HIRAD design is the Stepped Frequency Microwave Radiometer (SFMR) that has successfully measured surface wind speed and rain rate in hurricanes from the NOAA Hurricane Research Division’s (HRD) P-3 aircraft. Unlike the SFMR that views only at nadir, the HIRAD provides wide-swath measurements between ± 40 degrees in incidence angle with a spot-beam spatial resolution of approximately 1-3 km. HIRAD would be able to provide high resolution hurricane imaging when used on an operational hurricane surveillance aircraft such as the NOAA HRD’s Gulfstream-IV.